بازوی روباتیکی که غذا را داخل دهان افراد معلول میگذارد (+عکس)
ایده اصلی برای ساخت این روبات پس از آن صورت گرفت که محققان دریافتند بخش اعظم افرادی که معلولیت جسمانی دارند قادر به بلند کردن قاشق یا چنگال نیستند و خوردن غذا به تنهایی برای آنها بسیار دشوار است.
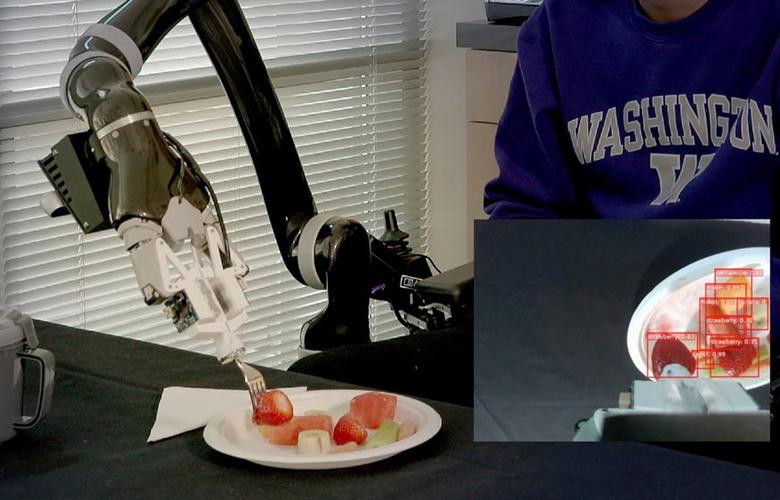
موبنا – بیشتر مردم به اتفاقاتی نظر استفاده از قاشق و چنگال و خوردن غذا فکر نمیکنند و این اعمال را به صورت خودکار انجام میدهند. با این وجود اگر قرار باشد یک روبات چنین کاری را انجام دهد، میبایست به تمام بخشهای آن فکر کنند و اطلاعات مربوط به هر حرکت خود را لحظه به لحظه پردازش کند تا در نهایت بتواند بهترین عمل را انجام دهد. محققان دانشگاه واشنگتن هم اکنون موفق به ساخت یک بازوی روباتیک کاملا خودکار شدهاند که میتواند بر حسب موقعیت خود و محل قرار گرفتن میز مقابل، بهترین روش را برای برداشتن غذا انتخاب کند. این روبات به گونهای ساخته شده است به صورت خودکار نوع غذا و محل قرار گرفتن دهان فرد مورد نظر را تشخیص میدهد و سپس، با کارد و چنگال غذا را از داخل بشقاب برمیدارد و آن را در دهان افرادی میگذارد که معلولیت حرکتی دارند و نمیتوانند به راحتی غذا بخورند.
این بازوی روبتیک که با نام ADA شناخته میشود، به گونهای طراحی شده است که میتواند به دسته صندلی چرخدار افراد ناتوان جسمی متصل شوند و به آنها در زمینههای مختلف کمک کند. سیستم داخلی بازوی روباتیک حسگرهای هوشمندی را شامل میشود که قادر است میزان نیروی مورد نیاز برای بریدن غذا یا بلند کردن آن را محاسبه کند و همچنین، یک دوربین ویژه روی این بازو کار گذاشته شده است که به صورت لحظه به لحظه موقعیت بشقاب را مورد بررسی قرار میدهد و محل قرار گرفتن صورت فرد را هم تحلیل میکند تا حتی اگر فرد معلول موقعیت دهان خود را تغییر داد، باز هم غذا را داخل دهان او بگذارد.

ایده اصلی برای ساخت این روبات پس از آن صورت گرفت که محققان دریافتند بخش اعظم افرادی که معلولیت جسمانی دارند قادر به بلند کردن قاشق یا چنگال نیستند و خوردن غذا به تنهایی برای آنها بسیار دشوار است. زمانی که فرد مبتلا به ناتوانی جسمی تصمیم به خوردن غذا میگیرد و بازوی روباتیک را فعال میکند، این سیستم محل قرار گرفتن بشقاب غذا را به صورت کامل دقیق اسکن میکند که این فرآیند به کمک دوربین آن انجام میشود. سپس موقعیت قرار گرفتن تمام بخشهای غذا در ظرف، شکل آنها و … نیز اسکن میشود. در مرحله بعد پردازش اطلاعات صورت میگیرد تا دستگاه بتواند بهترین روش برای برداشتن هر بخش غذا از داخل بشقاب را پیدا کند و سپس دوربین محل قرار گرفتن صورت فرد را به صورت لحظه به لحظه تشخیص میدهد تا حین حرکت چنگال، غذا به بهترین شکل وارد دهان او شود.


الگوریتم هوشمندی که این تیم تحقیقاتی برای بازوی روباتیک طراحی کرده بسیار پیچیدهتر از چیزی است که فکر میکنید. بخش نخستین این الگوریتم یک سیستم پیشرفته موسوم به «رِتینا-نت» را شامل میشود که در اصل برای اسکن کردن بشقاب غذا ساخته شده است. این سیستم میتواند تمام محتوای داخل بشقاب را شناسایی کند و سپس با درصد خطای نزدیک به صفر محل قرار گرفتن از بخش غذا داخل بشقاب را تشخیص دهد. در این مرحله الگوریتم هوشمند یک چارچوب مجازی اطراف هر تکه از غذا را برای خود در نظر میگیرد. فاز دوم فعالیتهای بازوی روباتیک به کمک الگوریتم دیگری موسوم به SPNet فعالیت میکند. این سیستم ثانویه قادر است نوع غذا در هر چارچوب مجازی را تحلیل کند و در نهایت دریابد بهترین روش برای بلند کردن این بخش از غذا چگونه است.

دکتر «سیدارتا سرینیواسا» از مدیران این گروه تحقیقاتی که گزارش نهایی آن را تکمیل کرده است توضیح داد: «یکی از چالشهای بزرگ در عرصه مهندسی پیدا کردن راه حلهای شگفت انگیز نیست و در عوض، کشف روشهایی است که بیشترین نزدیکی را با زندگی روزمره مردم داشته باشند و افراد از حضور روشهای مهندسی در کنار خود احساس خوشایند داشته باشند. اگر ما به این مسئله توجه نکنیم که دستگاه نهایی ساخته شده تا چه اندازه با زندگی روزمره مردم سازگار است و استفاده از آن چقدر آسان است، به طور قطع مردم چنین محصولی را نمیپذیرند و پس از مدتی این پروژه با شکست مواجه میشود. باید توجه داشته باشید که در سراسر جهان میلیونها نوع غذای مختلف وجود دارد و تشخیص آنها به کمک دستگاههای روباتیک بسیار دشوار است. مهمترین مشکلی که ما برای ساخت این بازوی روباتیک پیش روی خود داشتیم ارایه استراتژیهای هوشمندانهای بود که به کمک آن بتوانیم امکان تشخیص انواع مختلف غذاها را برای روبات فراهم کنیم».
این الگوریتمها در ابتدا چگونگی رفتار افراد مختلف را به صورت جداگانه بررسی میکنند و سپس انواع مختلف غذاهایی که باب میل فرد است را تشخیص میدهند. الگوریتم جدید دانشمندان به گونهای ساخته شده است که میزان سختی غذاهای مورد علاقه فرد معلول از جمله هویج را میتواند تشخیص دهد یا در مقابل به راحتی نرمی غذاهای دیگر نظیر موز را محاسبه میکند. همچنین برای این بازوی روباتیک میزان سختی پوست میوهها ماننده پرتقال، میوههای نرم مانند انگور و … فراهم شده است. بازوی روباتیک به کمک چنگالی که در دست دارد میتواند نیروی مورد نیازی که برای برداشتن هر قطعه غذا باید وارد کند را محاسبه کند و در نهایت بتواند به بهترین شکل و بدون خراب شدن شکل ظاهری غذای مورد نظر آن را از داخل بشقاب بردارد.

آزمایشهای صورت گرفته روی این بازوی روباتیک نشان داد که الگوریتمهای هوشمند به درستی تشخیص میدهند که برای برداشتن مواد غذایی مختلف از هویج گرفته تا موز، چه نیرویی نیاز است. در عین حال این سیستم میتواند تکنیکها و روشهای مختلفی که متوجه آنها نمیشویم را هم مورد استفاده قرار دهد و به عنوان مثال، حین فعالیتهای خود یاد بگیرد که فرد معلول در چه ساعتهایی از روز تمایل به خوردن غذاهای سفت دارد و به طور کلی غذاهایی که فرد در طول شبانه روز مصرف میکند تا چه اندازه سفت یا نرم هستند.
الگورتیمهایی که برای بازوی روباتیک ADA در نظر گرفته شدهاند میتواند تمام نکات لازم از لحظه قرار گرفتن پشت میز تا خوردن غذا توسط فرد معلول را بررسی کند و در نهایت فعالیت خود را به گونهای انجام دهند که شخص با هیچ گونه مشکلی مواجه نشود و از این اتفاق احساس خوشایندی داشته باشد. نتیجه نهایی آزمایشهای صورت گرفته به گونهای بوده است که دانشمندان میگویند دقت این بازوی روباتیک با دست انسان برابری میکند تا غذا بدون هرگونه مشکل از داخل بشقاب برداشته شود و به داخل دهان فرد معلول انتقال یابد.
دکتر سرینیواسا در این خصوص توضیح داد: «هدف ما در نهایت این است که بازوی روباتیک جدید بهترین ابزار کمکی برای خوردن شام و نهار در کنار افراد معلول باشد. البته نکته مهمی که در این زمینه وجود دارد این است که ما نمیخواهیم بازوی روباتیک خود را جایگزین افرادی کنیم که مراقب معلولین هستند، این فناوری هوشمند به به صورت مکمل در کنار آنها مورد استفاده قرار میگیرد. افرادی که از معلولین مراقبت میکنند به کمک این بازوی هوشمند میتوانند فعالیتهای روزانه را بهتر انجام دهند».
دانشمندان نتایج حاصل از این تلاش خود را در قالب یک گزارش علمی در آخرین شماره از نشریه بینالمللی «مقالات روباتیک و اتوماسیون IEEE» به چاپ رساندند.



