الهام گرفتن دانشمندان از طبیعت برای حرکت رباتها در مسیرهای ناهموار (+فیلم و عکس)
پژوهشگران آمریکایی موفق شدند با استفاده از الگوریتمهای جدیدی برای رباتها، امکان هموار کردن مسیرهای پیش رو و رسیدن به هدف را فراهم کنند.
موبنا – پژوهشگران “دانشگاه ایالتی نیویورک در بوفالو”(UB) باور دارند رباتهای خودکار میتوانند روی زمین هموار یا غیرقابل تغییر، عملکرد خوبی داشته باشند اما ممکن است با موانع تصادفی یا زمین ناهموار روبرو شوند. متخصصان حوزه رباتیک، برای حل این مشکل، طبیعت را بررسی کردهاند.
“نیل نپ”(Nil Napp)، استادیار مهندسی و علوم رایانه این دانشگاه گفت: هنگامی که سگ آبی، سدی مقابل آب میسازد، از هیچ الگوی از پیش تعیین شدهای پیروی نمیکند، بلکه به جریان آب واکنش نشان میدهد و سعی میکند از آن پیشگیری کند. ما در حال ابداع یک سیستم خودکار برای تقلید چنین رفتاری هستیم تا ربات به طور مداوم، زمین را بررسی و اصلاح کند.
این پروژه، الگوریتمهایی را ارائه میدهد که به ربات کمک میکنند از عهده طبیعت غیرقابل پیشبینی چنین موانعی برآید. قوانین ریاضی این الگوریتم، براساس “نشانهورزی”(stigmergy) استوار هستند. نشانهورزی، نوعی ارتباط غیرمستقیم و هماهنگی میان انجامدهندگان یک عمل برای اجرای بهتر آن است. از میان مثالهای نشانهورزی در طبیعت میتوان به موریانهها اشاره کرد که میتوانند یک شبکه بسازند و در ارتباط با یکدیگر عمل کنند.



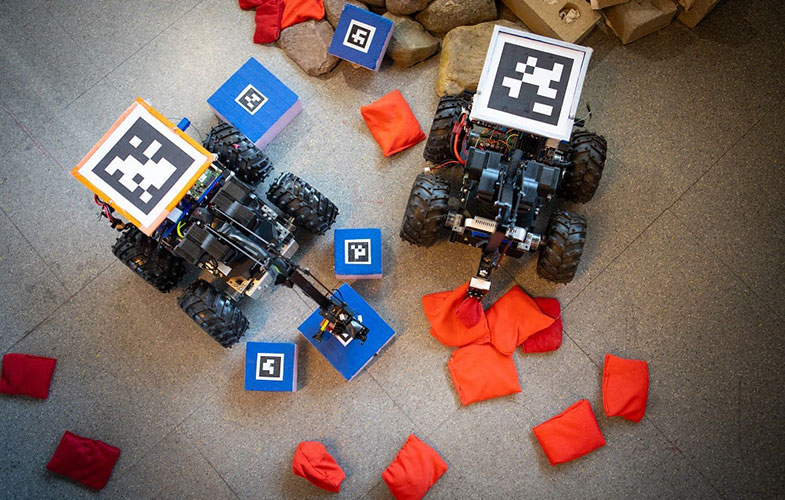
نپ و همکارانش برای آزمایش این اصل در رباتها، از یک دوربین و یک بازوی رباتیک استفاده و یک نرمافزار متداول را نیز روی ربات نصب کردند که امکان بررسی پیوسته اطراف را برای آن فراهم میکرد. سپس، برای بررسی عملکرد ربات، اشیایی مانند آجر، سنگ و بتنهای شکسته و همچنین کیسههای لوبیا را روی زمین قرار دادند.
ربات توانست کیسههای لوبیا را بردارد و آنها را در شکافهای بین خرده سنگها قرار دهد و بدین ترتیب، زمین را برای حرکت آماده کند.
نپ افزود: ربات موفق شد از محیط اطراف خود، سرنخهایی به دست آورد و تا هنگام ساختن یک رمپ، سازگاری خود را با طبیعت حفظ کند. با این توانایی، ربات میتواند اشتباهات خود را اصلاح کند و به موانع واکنش نشان دهد.
پژوهشگران باور دارند این ابداع میتواند کاربرد رباتها را در عملیات جستجو و نجات و همچنین اکتشافات، افزایش دهد.
مقاله این پژوهش، در هفته جاری، در کنفرانس ” Robotics: Science and Systems” ارائه میشود.
منبع: ایسنا

