قایق رباتیک هوشمند؛ با قابلیت تولید توسط چاپگرهای سهبعدی (+عکس و فیلم)
ناوگان قایقهای خودکار میتواند بار بسیاری از خدمات شهری را به عهده بگیرد و ترافیک جادهای را در شهرهای دارای رودخانه کاهش دهد. قایق هایی که به وسیله چاپگرهای سهبعدی تولید خواهند شد و میتوانند حمل و نقل را به شکل خودکار انجام دهند.
موبنا؛ علی مهدوی – مهندسان پروژهRoBoat در حال برنامهریزی برای ساخت قایقهای خودکار هستند که در آبهای رودخانههای شهری از جمله در شهر آمستردام برای حمل مسافر و بار، پیوستن به دیگر قایقها برای ساخت ساختارهای موقت شناور و همچنین نظارت بر محیط زیست با نمونهگیری از آبهای رودخانه و اقیانوسها به کار گرفته خواهد شد.
پروژه RoBoat همکاری بین MIT و مؤسسه آمستردام برای کاهش بار هزینههای شهرهای پیشرفته است. در واقع هدف از این طرح کاهش ترافیک در خیابانهای شلوغ با اضافه کردن کانالهای عبوری دیگر است. علاوه بر حمل مسافر یکی از مهمترین خدمات این قایقها حمل زبالههای شهری است که طی شب با استفاده از کامیونها انجام میشود و انجام بعضی از این خدمات شهری در شب میتواند به کاهش بار ترافیک جادهها کمک کند.

برای رسیدن به این هدف، تیم پروژه، قایقهای کوچک هوشمند را با طیف وسیعی از سنسورها و تجهیزات الکترونیکی مجهز کردهاند، و این امکان وجود دارد تا به هم بپیوندند و تبدیل به سازههای شناور موقت مانند پلها، اسکله، و یا حتی مکانی بزرگ برای کنسرت و بازارها روی آب شوند.
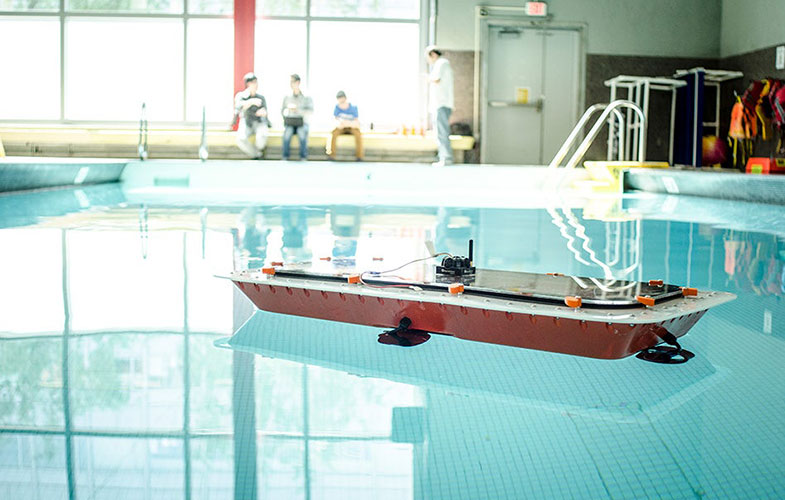
در حال حاضر، طراحی این قایق تکمیل شده است. اولین و مهمترین نکته، تولید این قایق بهوسیله چاپگرهای سه بعدی است. این کار با استفاده از یک چاپگر تجاری به مدت ۶۰ ساعت به طول انجامیده که ۱۶ قطعه را تولید میکرد. سپس این قطعات با چند لایه فایبرگلاس به هم متصل میشدند تا در مجموع یک بدنه به اندازه ۴ متر در ۲ متر تشکیل شود.
هر یک از قایقها دارای منبع تغذیه، Wi-Fi، مکانیاب ، واحد اندازهگیری درونی (IMU)، یک مینی کامپیوتر و یک میکروکنترلر هستند. ماژولهای GPS میتوانند موقعیت خود را با دقت سانتیمتری مشخص کنند؛ در حالی که ردیابی مسیر با استفاده از یک سیستم بیسیم اولتراسوند انجام میشود.
محققان برای چالاکی و افزایش سرعت عکس العمل قایق، محرکها و نیروی پیشرانه را در هر یک از چهار طرف آن قرار دادهاند. این باعث میشود که قایق به همان اندازه که به سمت جلو و عقب حرکت میکند، به سمت چپ و راست نیز حرکت داشته باشد. عوامل دیگری از جمله نیروی گریز از مرکز، نیروی درگ و تغییر جرم برای حفظ این فاکتور وجود دارند. برای اطمینان از کنترل و پایداری قایق آن را در بیش از ۱۰ مسیر آزمایشی قرار دادند و خطاهای ردیابی آن بسیار ناچیز بود.
پروژههای بعدی شامل یافتن راههایی برای حساب کردن امواج، جریان آب و اضافه وزن مسافر و محموله خواهد بود.
این مقاله در کنفرانس بین المللی رباتیک و اتوماسیون IEEE ارائه شده است و در ویدیوی فوق تستهای این قایق رباتیک به نمایش گذاشته شده است.



